- ID : Détruire par laser (ceux des petits découpage lasers) les frelon asiatiques qui patrouillent devant les ruches et détruisent les colonies abeilles.
Principe / ID :
- Projet déjà fait ici avec un suivi par un pointeur laser : https://www.youtube.com/watch?v=oJAl9Yd3kNo

- Mais pas de code ….
- => Flux Vidéo
- => Reconnaissance des frelons => Position (2D ? 3D?) , direction, vitesse,
- => Calcul des trajectoires et interception => calcul direction => Positionnement (Miroirs?) = visée + déclenchement tir laser.
- Commandes:
- Raspberry
- Gestion camera
- Gestion Python
- Reconnaissance image
- Calcul trajectoire réelle cible
- calcul coordonnées interception et commande de tir
- Envoi des commandes calculées a Arduino + commande de tir
- Arduino :
- Réception commandes du Raspberry
- Commandes aux Servos (Alignement système de tir)
- Commande au Système de tir
- Raspberry
- Acquisition et prétraitement flux vidéo => OpenCV https://opencv.org/
- Reconnaissance image : Tensorflow => https://www.tensorflow.org/overview
- Reconnaissance / training set in CASCADE Cf références ci dessous (Model training : Haar ou bien LBP (Local Binary Patern)
Références :
- ****** https://thedatafrog.com/fr/articles/human-detection-video/ ***
- DIY Caméra UV avec Raspberry : https://stereopi.com/blog/deep-ultraviolet-imaging-using-raspberry-pi-hq-camera
- Tuto Python: Filtre de Kalman prédiction trajectoire : https://www.youtube.com/watch?v=IT4i_ooQDDM
- Utiliser toute une liste de capteur et détecteurs avec Raspberry / Arduino :
- https://www.gcworks.fr/tutoriel/pico/Boutonpoussoir.html
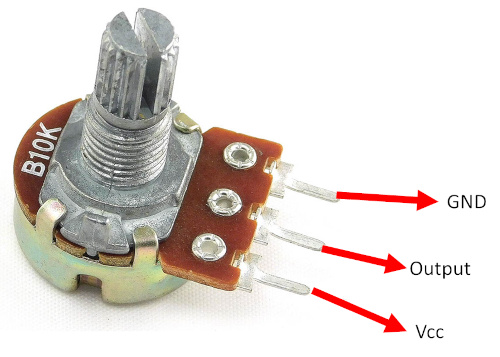
- https://www.gcworks.fr/tutoriel/pico/Potentiometre.html
- https://www.gcworks.fr/tutoriel/pico/UtrasonicRanger.html
- Avec le bus Grove :
- Avec une carte ADC (Analogic to Digital Convert)(pour les potentiométres de position)
- https://passionelectronique.fr/tutorial-ads1115/
- https://www.instructables.com/Raspberry-Pi-I2C-Python/ Pour activer I2C sur raspberry
- Avec un relai (commande de tir) :
Budget Matériel : 300 à 400€
- Laser : 500Mw Model FA02 (?) 12V Wave length 405 nm => 150€ environ : utilisé pour gravure bois (les frelons ça doit le faire / les ailes en particulier)
- Raspberry Pi => Logiciel embarqué (Linux => Python ) + commande + caméra
- Modèle : Raspberry Pi 4 Modèle B 4 Go ARM-Cortex-A72 4 x 1,50 GHz, 4 Go de RAM, WLAN-AC, Bluetooth 5, LAN, 4 x USB, 2 x Micro HDMI
- Amazon : 200€
- Modèle : Raspberry Pi 4 Modèle B 4 Go ARM-Cortex-A72 4 x 1,50 GHz, 4 Go de RAM, WLAN-AC, Bluetooth 5, LAN, 4 x USB, 2 x Micro HDMI
Pour le démarrage : Commencer plus simple que du tir automatique avec un « Fusil » laser => Reconnaissance cible => Calcul direction et trajectoire interception pour assister le tir
Python :
- Les fichiers avec extension .py => ouvrir avec IDLE (clic droit : Edite avec IDLE)
- l’éditeur a un mode : RUN qui lance la console.
- Sinon : Powershel : C: py
Raspberry Pi :
- Installation Raspbian (Sim requise) : https://www.youtube.com/watch?v=SUMYJJ6ulaM
- Connexion a distance : https://www.aranacorp.com/fr/connexion-a-distance-au-raspberry-pi/
OpenCv : Bibliothèque Python
Apprentissage : Fichiers Cascade (Haar Cascade)
- Tuto : ***Training a Cascade Classifier – OpenCV Object Detection in Games #8 ** https://www.youtube.com/watch?v=XrCAvs9AePM
Reconnaissance d objet :
-
- Tuto 34 : reconnaissance Oeufs (Par différence)
- Tuto 13 : détection par soustraction (isole le fond de ce qui bouge)
- Tuto 36 : Filtre Kalman => Prédiction de trajectoires multiple et identification
- https://www.youtube.com/watch?v=pR0TAFWnDdU
- Code : https://github.com/L42Project/Tutoriels/tree/master/Divers/tutoriel36
Filtrer couleur : (le jaune par exemple)
[pastacode lang= »python » manual= »import%20cv2%0Aimport%20numpy%20as%20np%0A%20%0Acap%20%3D%20cv2.VideoCapture(0)%0A%20%0Awhile(1)%3A%0A%20%20%20%20_%2C%20frame%20%3D%20cap.read()%0A%20%20%20%20%23%20It%20converts%20the%20BGR%20color%20space%20of%20image%20to%20HSV%20color%20space%0A%20%20%20%20hsv%20%3D%20cv2.cvtColor(frame%2C%20cv2.COLOR_BGR2HSV)%0A%20%20%20%20%20%0A%20%20%20%20%23%20Threshold%20of%20blue%20in%20HSV%20space%0A%20%20%20%20lower_blue%20%3D%20np.array(%5B60%2C%2035%2C%20140%5D)%0A%20%20%20%20upper_blue%20%3D%20np.array(%5B180%2C%20255%2C%20255%5D)%0A%20%0A%20%20%20%20%23%20preparing%20the%20mask%20to%20overlay%0A%20%20%20%20mask%20%3D%20cv2.inRange(hsv%2C%20lower_blue%2C%20upper_blue)%0A%20%20%20%20%20%0A%20%20%20%20%23%20The%20black%20region%20in%20the%20mask%20has%20the%20value%20of%200%2C%0A%20%20%20%20%23%20so%20when%20multiplied%20with%20original%20image%20removes%20all%20non-blue%20regions%0A%20%20%20%20result%20%3D%20cv2.bitwise_and(frame%2C%20frame%2C%20mask%20%3D%20mask)%0A%20%0A%20%20%20%20cv2.imshow(‘frame’%2C%20frame)%0A%20%20%20%20cv2.imshow(‘mask’%2C%20mask)%0A%20%20%20%20cv2.imshow(‘result’%2C%20result)%0A%20%20%20%20%20%0A%20%20%20%20cv2.waitKey(0)%0A%20%0Acv2.destroyAllWindows()%0Acap.release() » message= » » highlight= » » provider= »manual »/]
Communication Raspberry/Arduino : GPIO
- par la nappe GPIO : https://deusyss.developpez.com/tutoriels/RaspberryPi/PythonEtLeGpio/
- Par le port USB : https://www.aranacorp.com/fr/communication-serie-entre-raspberry-pi-et-arduino/
Pilotage Servo moteurs :
- Via arduino :
- Via raspberry:
Chronologie :
- Oct 2023 :
- Achat : Raspberry Pi 3B+ (30€) / Camera Raspberry Infra Rouge + (20€) + Camera Raspberry Standard (5Mpx) 8€ / 6 servo moteurs 20€ + connectique 15€ / Arduino (en stock)
- Formation : Python / Opencv (librairie reconnaissance image) / Linux