- Objectif : en faire un robot de surveillance à distance pour vérifier pendant les absences (vacances, déplacement) les raisons du déclenchement d’une alarme.
- Les plus :
- connexion Wifi native (mais sous forme de serveur, on verra l’inconvénient plus loin)
- Caméra intégrée avec un débit très correcte et une fonction vision nocturne efficace (utile pour un local aux volets clos)
- Un micro et un haut parleur intégré.
- Un guidage à partir d’une App Iphone ou Ipad
- Un guidage relativement facile : par bouton ou inertie de la tablette
- Les moins :
- La connexion à la tablette se fait par un réseau généré par le Rover. Cela permet un très haut débit et une fluidité de guidage et de vidéo très élevé mais empêche la connexion à distance. L’app est programmée pour une connexion au réseau spécifique du Rover.
- IP router ROVER : 192.168.1.100
- Si l’on veut utiliser l’App à distance il faut émuler cette adresse sur le Wifi de connexion. => PAS SIMPLE
- Autre solution passer par une interface de guidage de type HTML/ Javascript puisque le ROVER dialogue avec l’App via un mini serveur HTTP
- Et Faire un Pont Wifi entre le Rover et la connexion WIFI local (Internet) nexion Internet + Wifi local
- Le pbs c’est que l’adresse du réseau Wifi Rover devrait être changé en 198.168.2.1 avec un réseau WIFI Local en 19.168.1.1 pour faire un pont.
- Des embryons d’interface Java existe : AC13 Library
- Une Appli Android a été développée par Uceta.
- Une autre solution serait de passer par le logiciel Ez-Robot (Gratuit)
- Connecter le Rover à un PC :
- Bus Pirate : 40$ pour la V4 port International inclus

- « just set the Bus Pirate to UART, 115200/8/N/1, Idle 1, Normal. then I set it to Transparent Bridge using the (1) macro, let the Bus Pirate reset into that mode, and then fired up the rover and went to town »
- Achat ce jour (02/09/2013) du Bus Pirate 38€ sur Ebay ( Bus Pirate v4 Universal Interface (1-Wire, I2C, SPI, UART etc) BPv4 Gadget ) : Sandbox_electronics (copie de celui de Dangerous Prototyope moins bien fini et a peine moins cher).
- Il semble possible de récupérer (Downloader) les fichiers :
- 1.camera.unz.tar – untars to camera.unz
- Camera contiendrai les CGI de commande (pour passer des instructions d’un browser distant)
- 2.dump_to_binary.py.tar – untars to a python file
- 3.firmware.tar – untars to three files Boot_info, linux and romfs
- 4.romfs.tar – untars to linux directory structure
- 5.webui.bin.tar – untars to webui.bin
- 6.webui.tar – untars to a www kind of directory
- 1.camera.unz.tar – untars to camera.unz
- La question est :
- Comment les modifier ?
- Changer l’adresse Router de base de 192.168.1.100 en 192.168.2.100
- Comment les recompiler ?
- comment les Uploader ?
- Comment les modifier ?
- S29GL032N90TF1040 and is the expected 32Mbit (4MB) Spansion flash chip
- Bus Pirate : 40$ pour la V4 port International inclus
- L’autonomie est mince : 2:30
- A contourner avec des accus NiMh (2100mAh moins que des piles Alcalines 2900mAh)
- un chargeur externe qui maintient la charge
- Une base de rechargement une fois la mission terminée.
- Le Hacking le plus avancé est de Armin Tamzarian en Février 2012
- il a trouvé que :
- Le système semble copié en grande partie d’un webcam motorisée.
- L’OS est un mini Linux qui permet de gérer le son, la vidéo, l’USB, un serveur web, le wifi.
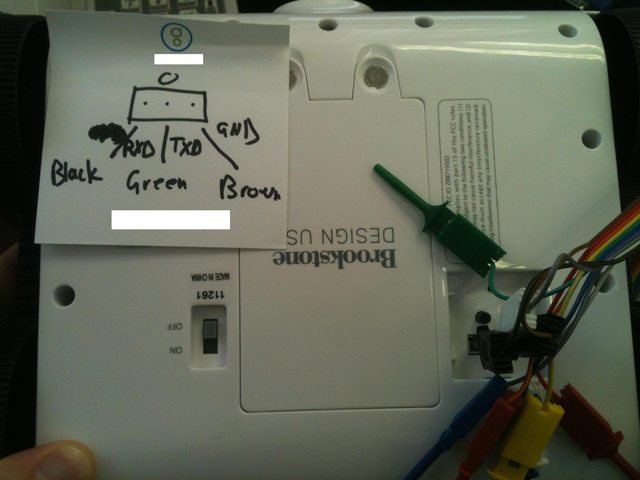
- L’interface série du robot est un connecteur 3 pins
- En effet, une fois connecté au Rover en Wifi :
- Connection via un browser en 192.168.1.100
- User : AC13
- Psw AC13
- Les Pages Web dispo :
- Il utilise un système qui dialogue avec la Console Série
- Bus Pirate : cf supra
- il a trouvé que :
- La connexion à la tablette se fait par un réseau généré par le Rover. Cela permet un très haut débit et une fluidité de guidage et de vidéo très élevé mais empêche la connexion à distance. L’app est programmée pour une connexion au réseau spécifique du Rover.
Au cas où tout ceci ne marche pas je viens d’acheter pou 39€ une camera WIFI motorisée (mais fixe) avec vision nocturne.
